Multi-robot systems prevail over the past decade. In particular, these systems provide an intelligent and automated solution for material transportation and information collection in smart warehouse, unmanned factories, automated ports, and many other potential scenarios. A fundamental problem in these applications is to tell the robots where they should go and how to arrive their target locations as quick as possible, namely, plan collision-free paths for the robots while minimizing their arrival times.
Exact Algorithms for MCPF
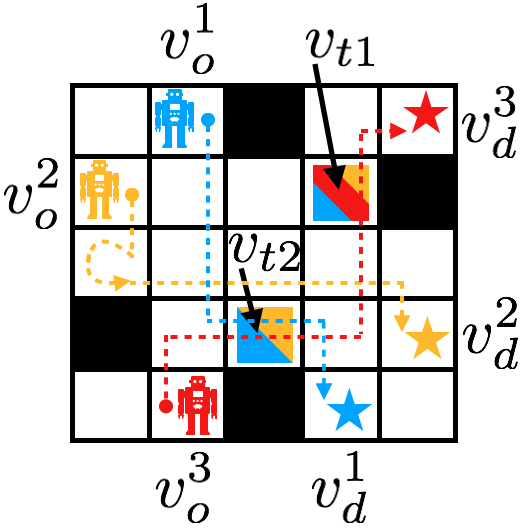
Conventionally, Multi-Agent Path Finding (MAPF) seeks an ensemble of collision-free paths for multiple agents from their respective start locations to their respective goal locations while minimizing a cost function defined over the paths. Here, we consider a generalization of MAPF where the agents must also visit a given set of intermediate target locations before reaching their goals. We refer to this generalization as Multi-Agent Combinatorial Path Finding (MCPF), which aims to find “start-target-goal” paths for the agents rather than the “start-goal” paths as in MAPF. MCPF is quite challenging as it requires both collision avoidance between agents (as present in MAPF), and target sequencing, i.e., solving Multiple Traveling Salesman Problem (MTSP) to specify the allocation and visiting orders of targets for all agents. MCPF requires handling both collision avoidance and target sequencing simultaneously, which has rarely been addressed before by MAPF or MTSP research. Both the MTSP and the MAPF are NP-hard to solve to optimality, and so is MCPF.
To handle the challenges, we develop a family of algorithms [1], [2] to find optimal, bounded sub-optimal and sub-optimal solutions to MCPF by leveraging the recent advances in both MAPF and MTSP. The main idea behind our approaches is to interleave MTSP and MAPF approaches in a princiipled way in order to provide solution quality guarantees. Our approach alternates between generating target sequences for the robots by (i) solving a MTSP where the collision avoidance constraint is relaxed, and (ii) generating collision-free paths for agents while fixing the target sequences. We instantiate this idea within the framework of dynamic programming and branch and bound, which leads to CBSS [1] and MS* [2], exact algorithms that can find optimal solutions for MCPF.

Bounded Sub-optimal Approach for MCPF
We trade-off solution optimality for scalability by developing a bounded sub-optimal algorithm based on our CBSS method [1]. The key difficulty there is to develop an approximate methods for the K-best TSP, which is an essential building block to solve MCPF with solution quality guarantees. Conventionally, K-best TSPs are solved by a partition method, which iteratively creates new TSPs in a systematic way and solves each of them to optimality by invoking an exact TSP algorithm. However, since each generated TSP is computationally heavy to solve to optimality, this partition method is computationally burdensome especially for a large graph or a large K. To address this challenge, we seek to solve K-best TSPs by leveraging approximation algorithms for TSPs due to their fast running speeds and solution quality guarantees. Specifically, approximation algorithms often address TSPs by first solving a corresponding simpler problem, such as finding a minimum spanning tree, and then converting the result to a solution tour or path for TSPs. Approximation algorithms enjoy worst-case polynomial runtime complexities and are able to return bounded suboptimal solutions.
Although approximation algorithms for TSPs have been studied for decades, combining them with the partition method for K-best TSPs is under-explored and challenging for the following reason. Most approximation algorithms for TSPs require that the graph is metric, so that the edge costs satisfy the triangle inequality. However, the partition method needs to impose special edge constraints on the graph, which breaks the triangle inequality, and makes these approximation algorithms no more applicable. To handle this difficulty, we develop a new partition method called AK*, where “A” stands for Approximation and “K*” stands for Kbest. AK* can properly handle these edges constraints and can thus fuse a variety of approximation algorithms with the partition method to solve a family of K-best TSPs. More details about this work can be found in [3].
MCPF with Heterogeneous Task Duration
So far, our problem formulation and approaches simply direct the agent to visit the targets without considering the task duration, i.e., the amount of time needed for an agent to execute the task (such as picking an item) at a target location. In other words, when a robot reaches a target location to execute the task there, it takes time for the robot to finish the task, and during this period, the robot has to occupy that target location and thus blocks the paths of other agents. The inclusion of task duration further complicates the problem. When sequencing the targets, the task duration must be considered when solving the TSPs to optimally allocating the targets and finding the visiting order. Furthermore, task duration can be heterogeneous with respect to the agents and targets: different agents may take different duration for the task at the same target, and for the same agent, different targets may require different duration.
To tackle this challenge, we develop two methods. The first method post-processes the paths planned by any MCPF planner to include the task duration and has no solution optimality guarantee. It builds a temporal planning graph (TPG) that captures the precedence requirement between the waypoints along the agents’ paths, and then add the task duration to the target locations while maintaining the precedence requirement to avoid agent-agent collision. While being able to take advantage of any existing planner for MCPF, this first method only finds a sub-optimal solution to MCPF-D and the solution cost can be far away from the true optimum especially in the presence of large task duration. We instantiate this method by using our prior CBSS as the MCPF planner and name the resulting algorithm CBSS-TPG.
To find an optimal solution for MCPF-D, we develop our second method called Conflict-Based Steiner Search with Task Duration (CBSS-D), which is similar to CBSS by interleaving target sequencing and path planning. Here, CBSS-D needs to consider task duration during planning, and there are two main differences between CBSS-D and CBSS. First, CBSS-D needs to solve TSPs with task duration to find optimal target sequences for the agents to visit, and thus modifies the target sequencing part in CBSS. Second, when an agent-agent collision is detected during path planning, CBSS-D introduces a new branching rule, which is based on the task duration, to resolve the collision more efficiently than using the basic branching rule in CBSS. The numerical and simulation results show that our methods can handle up to 20 agents and 50 targets in the presence of task duration, and can execute the paths subject to robot motion disturbance. More information can be found in [4] [5].
MCPF for Tractor-Trailer Robots with Varying Body Lengths
Task execution involves not only task duration but also shape change. Consider robots collecting empty carts from workstations in a factory and transport the carts to the designated locations in a warehouse, where the number of carts (body length of an agent) increases at each target location (Fig. 6). Consequently, the planner has to consider the increased body length to avoid self-collision and inter-agent collision as well as target sequencing in these cluttered environments. With this motivation, we study a variant of MCPF called MCPF for tractor-trailers (MCPF-TT), where the agent body length increases after finishing the task at a target. To begin with, we formulate MCPF-TT by simplifying the motion model of robots and the representation of the workspace, by using a four-neighbor occupancy grid. We limit our focus to the challenge of planning with varying body lengths.
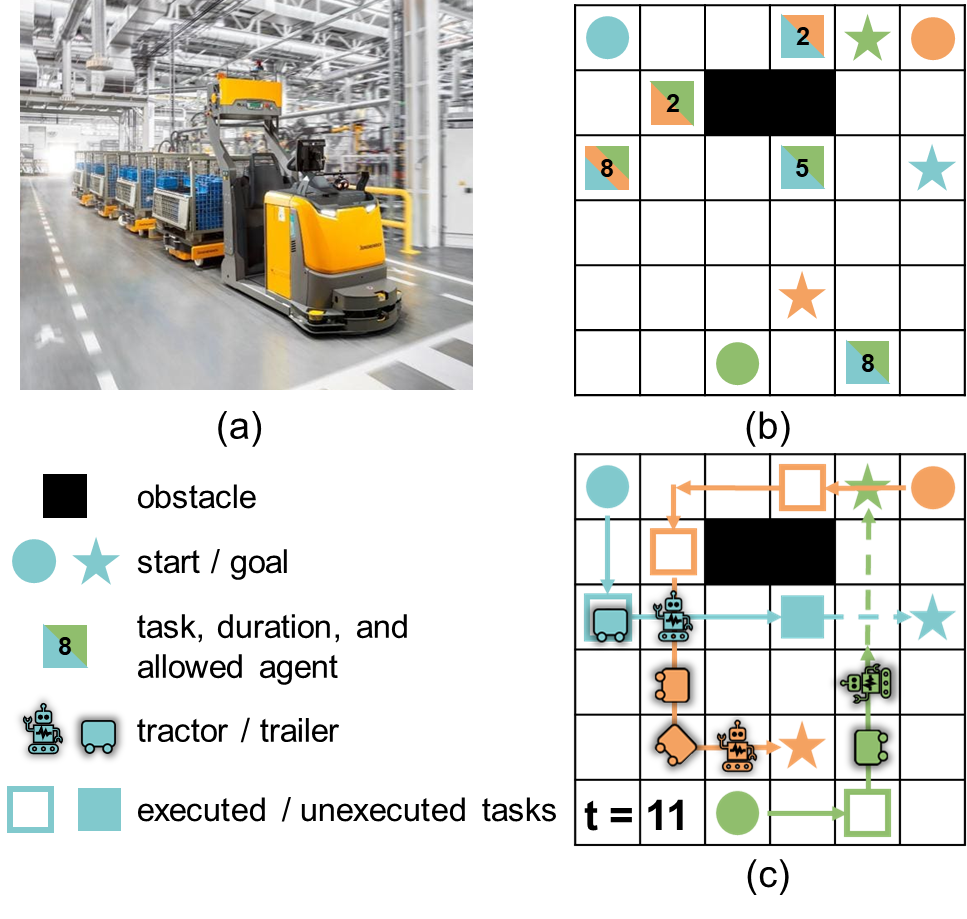
The varying body length of agents introduces challenges to planning. First, to avoid self-collision and find an optimal individual path for each agent, the planner must explore a much larger state space that includes the number of carts attached to the robot and the position of each of those carts, as opposed to planning merely the position of the robot itself. This state space has varying dimensions and grows exponentially with respect to the number of attached carts, which burdens the computation. Second, the agents with long bodies are more likely to collide with each other, especially when executing tasks, which increases coupling among the agents, and burdens the computation in collision resolution and target sequencing.
To address these challenges, we build upon our prior CBSS planner for MCPF and develop CBSS-TT [6]. On the low-level of CBSS-TT, we develop a new single-agent planner called Tractor-Trailer Combinatorial A* (TTCA*) that is guaranteed to find an optimal path for each agent with varying number of carts. On the high-level, we introduce new branching rules to resolve agent-agent collision more efficiently by considering the body length. We show that the entire approach is guaranteed to find an optimal solution for MCPF-TT. More information can be found in [6].